VTOL 4+1 (TFG)
Mi TFG en Ingeniería de Tecnologías Industriales, lo realicé dentro del proyecto europeo Ocontsolar, y
consistió en el desarrollo de un drone con superficie de sustentación para la toma de medidas de irradiancia
directa normal en plantas solares, capaz de poder ser integrado en una flota de drones autónoma.
Consulte el texto completo en la sección de publicaciones (enlace ).
1. Análisis CFD
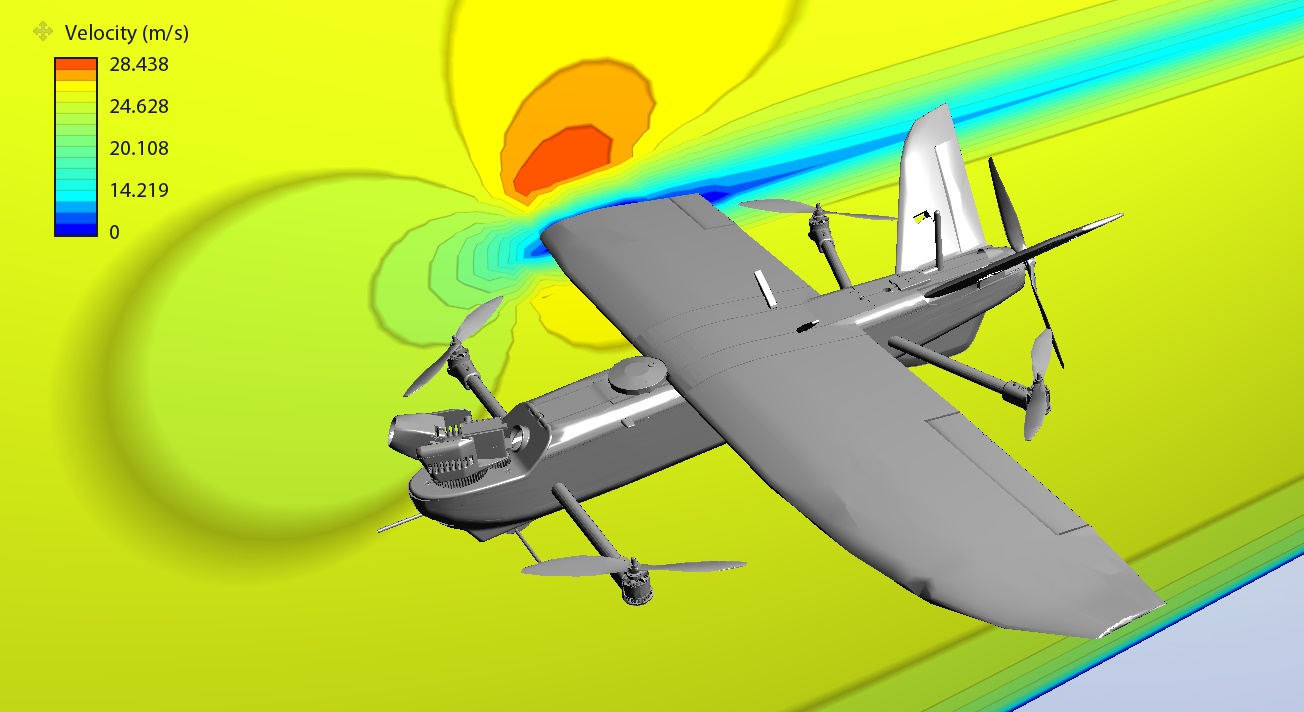 Se investigó qué tipo de VTOL era mejor para la aplicación dada las necesidades de vuelo, y tras realizar unos
modelos CAD preliminares se realizó un análisis CFD para determinar qué subtipo VTOL 4+1 presentaba una menor
resistencia aerocinámica.
Se investigó qué tipo de VTOL era mejor para la aplicación dada las necesidades de vuelo, y tras realizar unos
modelos CAD preliminares se realizó un análisis CFD para determinar qué subtipo VTOL 4+1 presentaba una menor
resistencia aerocinámica.
2. Dispositivo de Seguimiento Solar
Hubo que investigar cómo medir la irradiancia directa normal procedente del Sol y diseñar un dispositivo liviano y
capaz de tomar medidas con una velocidad apropiada ante las condiciones que impone ir montado en
un UAV. Además de lograr ubicar en el cielo la posición del Sol teniendo en cuenta el cambio de rumbo o actitud del UAV.
Durante este proceso se realizaron distintas pruebas diurnas para analizar la precisión de las medidas con la solución adoptada.
Esto ha sido algo apasionante y nuevo para mí, en lo que he seguido trabajando y desarrollando nuevos dispositivos con la misma finalidad.
3. Diseño CAD
Se digitalizó paso a paso un fuselaje comercial de un avión RC que serviría como base para el diseño de piezas y partes necesarias para ser transformado en un UAV VTOL. El proceso se puede apreciar con más detalle en el video superior.

Resultado final tras el diseño CAD
4. Construcción
Soldar, cortar, pegar, volver a imprimir piezas y ajustar tolerancias, pesar, equilibrar, cablear, medir temperaturas, volver a equilibrar, fijar conexiones...


Resultado final tras la Construcción
5. Software
Se tomó como punto de partida para el control y la estabilización del UAV la plataforma open source de Ardupilot, pero
se desarrolló un software independiente para enviar instrucciones desde una base terrestre a toda la flota de aeronaves,
con idea de gestionar información e instrucciones de dicha flota en tiempo real.
Siendo necesario desarrollar un software embarcado para cada UAV, para gestionar instrucciones con la controladora de vuelo,
el dispositivo de seguimiento solar, así como el software del mismo, y la estación terrestre para el control de la flota antes
mencionada. Todo ello por medio de distintos procesos trabajando en paralelo.
6. Simulaciones
Se demostró que el software desarrollado para los UAVs como para el control del enjambre es completamente funcional. Realicé una modificación del software de ArduPilot para poder simular una flota de drones, en este caso VTOLs, y superpuse una capa a modelo de nube para simular en paralelo la posible irradiancia medida por las aeronaves de la flota.
7. Pruebas
Se realizaron distintas pruebas* de vuelo y validación de datos, tanto de parámetros de la aeronave como de las medidas de irradiancia directa normal tomadas durante dichas pruebas de vuelo.
* Para ver pruebas de vuelo ver el video de YouTube (enlace )